1. 서론
2. 인공지능과 로봇수술의 개요
3. 수술 영역에서의 인공지능
3.1. Surgical field enhancement
3.2. Native tissue recognition
3.3. Instrument delineation
3.4. Tactile feedback
3.5. Stepwise automation
3.6. AI and surgical skill assessment
3.7. AI and prediction of postoperative outcomes
3.8. AI and surgical guidance
4. 미래 전망: 자율 로봇 수술 개발을 위한 AI
5. 결론
1. 서론
인공지능(Artificial intelligence, AI)이란 인간이나 동물의 지능이 아닌 기계나 소프트웨어의 지능을 말하는데, 1956년 다트머스 회의에서 처음 학문 분야로 인정되었다. AI 기술은 산업, 과학 전반에 걸쳐 널리 사용되고 있으며, 대표적으로 Google Search같은 웹 검색 엔진, 인터넷 상의 추천 시스템, 음성 인식 기술, 자율 주행 자동차 등이 있다. 의료분야에서 AI는 검사, 진단 및 전자 기록에서 생성된 고차원 데이터를 처리하고 분석하는 능력으로 주목받고 있다. 이렇게 분석된 데이터는 여러 도구를 통해 학습되어 질병을 진단 및 예측하고 의료 기술을 향상시키는데 이용되고 있다.
최근에는 의료에서도 다양한 AI 애플리케이션이 구현되었다. 이미지 분류, 객체 감지를 포함한 일부 의료 행위는 AI 프로그램으로 구현될 수 있다. AI 프로그램은 병리학적 전립선암 진단 정확도가 99.38%에 달하기도 한다. 종양 방사선 치료에서 Convolution Neural Network (CNN)은 91.9%의 정확도와 89.1%의 민감도로 종양을 구분해 냈다. 또한 AI는 수술 기술 평가, 암 조기 진단, 치료 약물 선택에도 효과적인 것으로 입증되었다. AI 모델링을 통해 의사는 수술경계면 양성에 대한 감지, 수술의 특정 단계에 대한 완전 자동화와 같은 도움을 받을 수 있다. AI는 또한 수술 교육 분야에도 혁명을 일으켰다. AI는 고도로 전문화된 수술 중 피드백을 생성하고 전달할 수 있는 가능성을 보여준다. 특히 로봇 수술은 가장 혁신적이고 영향력 있는 발전을 이룬 분야 중 하나이다. 이에 현재까지 보고된 비뇨기계 수술에서의 AI의 역할, 이를 이용한 완전 자율 수술의 가능성에 대해 간략히 정리하였다.
2. 인공지능과 로봇수술의 개요
인공지능(AI)은 인간의 지능이나 기동성을 요구하는 작업을 수행할 수 있는 컴퓨터 시스템 및 로봇 시스템을 말한다. ISO/IEC TR 24028:2020에서는 AI를 “지식과 기술을 획득, 처리 및 적용하는 엔지니어링 시스템의 능력”으로 정의하였다. 의료에서 AI는 치료 결과 및 환자 경험을 개선하는 데 도움이 되도록 데이터 분석을 통해 적용될 수 있다. 이로 인해 의사가 보다 정확한 결정을 내리고 더 높은 확실성으로 치료 결과를 예측할 수 있도록 도울 수 있다.
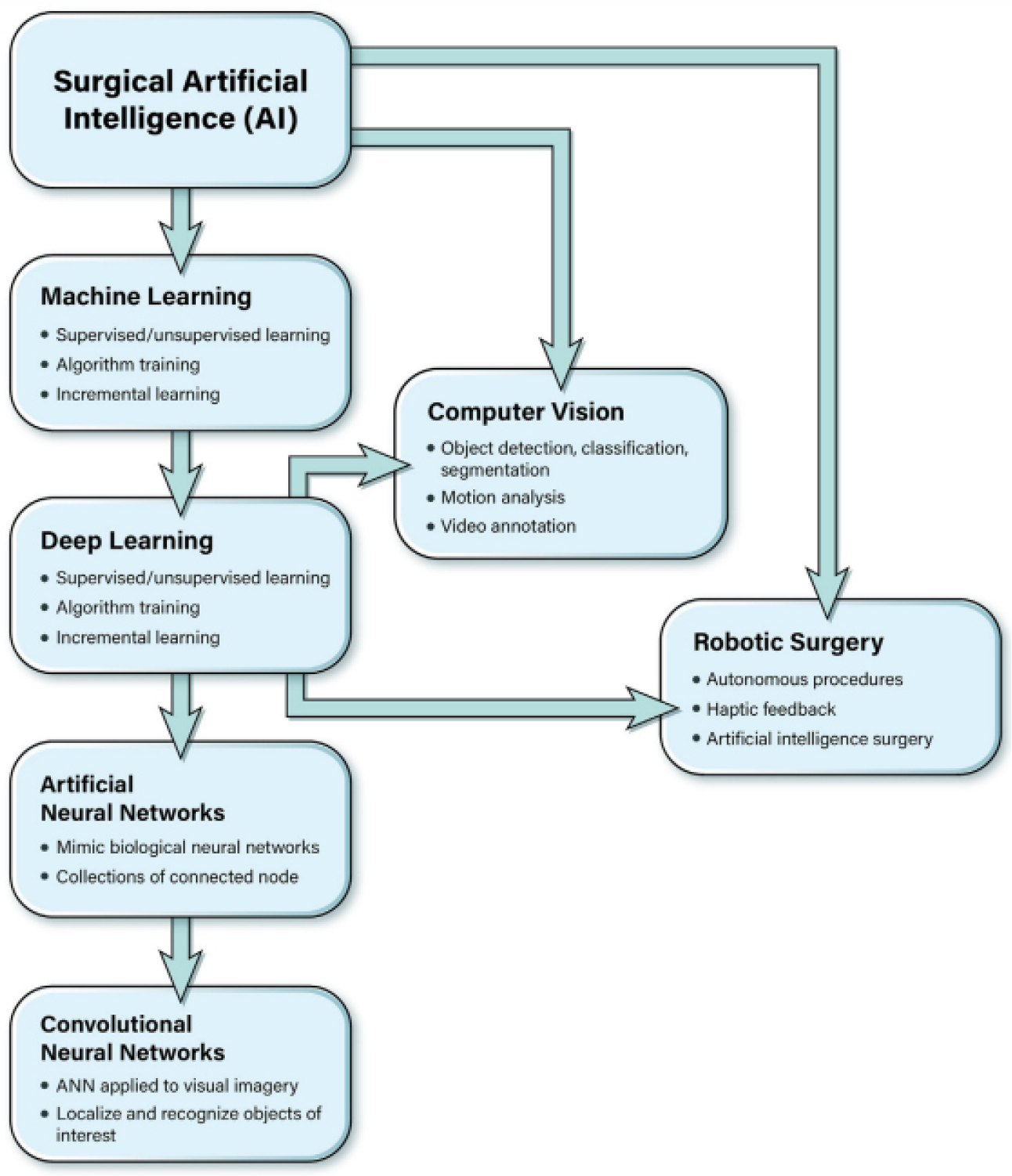
AI 시스템에는 인간의 인지를 모방하여 문제를 해결하도록 훈련된 컴퓨터가 필요하다. 머신 러닝(machine learning, ML)과 딥 러닝(deep learning, DL) 모델은 컴퓨터가 기본 데이터 패턴을 기반으로 예측을 할 수 있게 해주는 인공 지능의 하위 분야이다. 기존의 데이터와 ML 알고리즘 간의 상호작용의 분석에는 의료 전문가의 개입이 필요한데, 전문가의 개입 없이는 오류가 발생할 수 있다. ML은 여러 데이터 소스의 처리와 임상적으로 가치 있는 피드백으로 기존 통계 방법보다 더 높은 예측 정확도를 보여주었다. 당연히 AI로 인한 수술 오류 감소는 외과의사의 성과를 향상시킬 수 있을 것이다 [표 1].
표 1.
인공지능과 관련된 용어의 정의 [1]
AI의 발전과 함께 의료 영역에서 로봇을 사용하여 수행되는 수술이 점점 더 많아지고 있다. 현재 수술 로봇은 인간 술자가 없으면 로봇 자체가 자율성을 갖지 못하는 “마스터-슬레이브” 역할에 제한된다. 그러나 최근 AI와 ML의 발전은 수술 로봇의 기능을 확장하고 수술실에서의 수술 경험을 향상시키는 것을 목표로 하고 있다. 수술 로봇은 센서와 이미지를 통해 캡처한 데이터에 의존하여 작동하며, 이렇게 수집된 데이터는 또한 로봇 수술에서 AI 혁신을 이끄는 핵심 동력이 된다.
그러나 로봇 보조 수술과 AI를 구별하는 것이 중요하다. 자동화와 자율성은 하나의 스펙트럼에 존재하지만, 완전한 자율성은 가장 진화된 형태이다. 자동 기계는 어느 정도 운영자의 통제하에 있다. 그들의 움직임은 완전히 예측 가능하며 정해진 절차대로 진행된다. 자동 시스템에서의 동작 변화는 특정 조건에 따라 미리 결정된 매개변수라는 작은 변화만이 가능하다. 개입하는 변수가 너무 크면 자동 시스템이 적응할 수 없어 실패하게 된다. 그러나 자율성은 외부 사용자의 입력이 없이도 환경에 대한 이러한 대규모 적응 및 변화를 수행할 수 있는 능력을 의미하는데, 이는 작업을 “계획”함으로써 수행되며, 더 광범위한 데이터 세트와 상황을 인지할 수 있는 도구의 사용이 필요하다. 수술 자율성의 정도는 6단계로 구성될 수 있는데, 레벨 4와 5는 대부분 이론적인 것으로 아직 표준화된 적용 사례가 없다 [표 2].
표 2.
자율성의 레벨 [1]
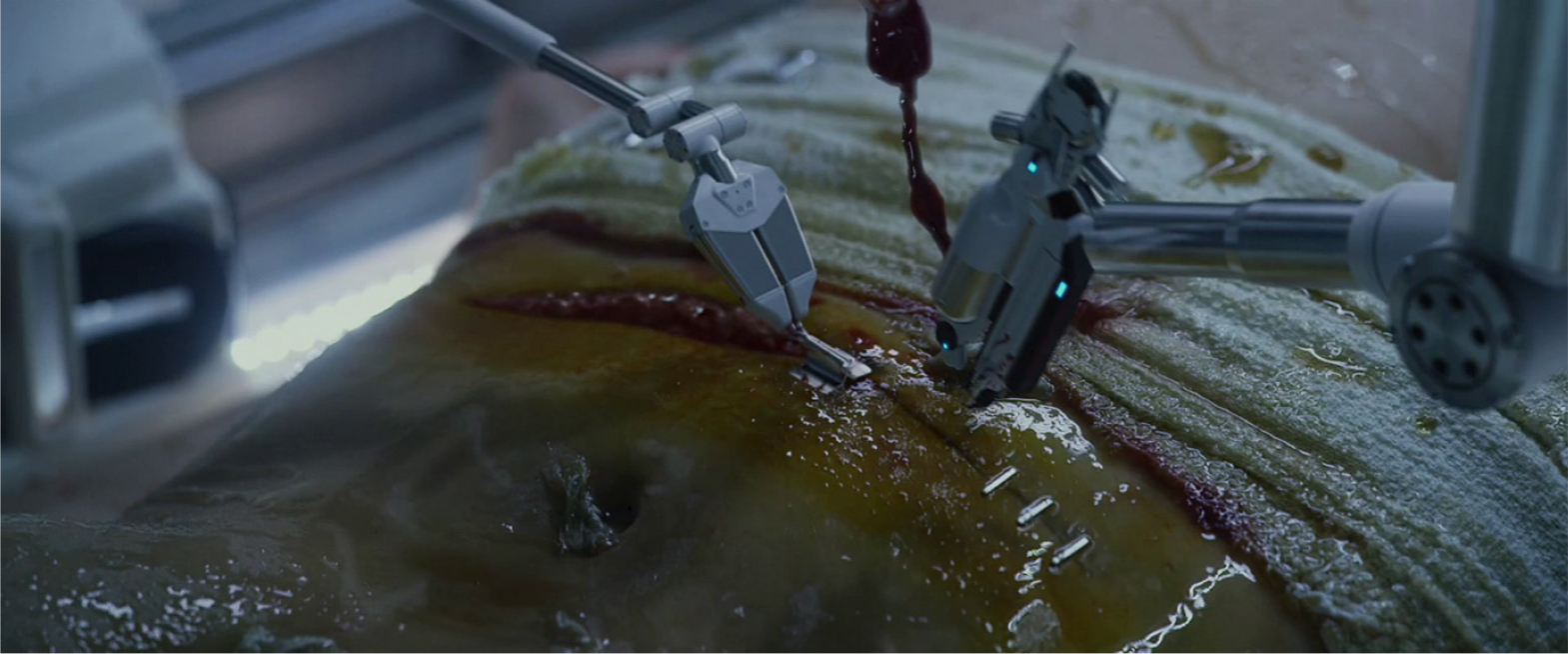
성공적인 적용을 위해서는 수술 중 환자의 해부학적 구조와 장비의 움직임을 추적하면서 환자의 해부학적 구조를 식별할 수 있는 다각적인 AI 플랫폼을 개발하는 것이 필요하다. 현재까지 많은 연구가 이 기술 개발의 토대를 마련했다. 예를 들어, Nosrati 등은 해부 중에 기구, 혈액, 지방 조직을 구별할 수 있는 다중 모드 접근 방식을 개발했다. 그들은 부분 신장 절제술 동안 수술 전 데이터를 수술 영상과 일치시킬 수 있었다. 현재 이러한 응용 프로그램에는 적응성이 포함되어 있지 않지만 이러한 응용 프로그램에 대한 연구는 매우 유망하다 [그림 1].
3. 수술 영역에서의 인공지능
3.1. Surgical field enhancement
로봇수술은 복강내 깊은 해부학적 공간에서 카메라와 기구를 이용하여 수술을 시행한다. 실시간 AI 이미지 향상을 통해 수술 기구 및 해부학적 구조의 식별을 향상시킬 수 있다. 수술 중 시야는 수술이 진행됨에 따라 지속적으로 변화하며, 이는 수술 영상 품질에 문제를 가져올 수 있다. 이러한 변화에 맞춰 수술 중 시각화를 향상시키기 위한 실시간 카메라 영상의 노이즈 제거, 흐려짐 제거 및 색상 교정이 가능한 프레임워크가 연구되었다. 로봇 수술 중 사용되는 전기 소작으로 연기가 발생하여 일시적으로 시야가 방해되기도 하는데, 이를 위해 수술 영상에서 연기 신호를 제거하여 깨끗한 수술 영상을 생성할 수 있는 CNN도 제안되었다.
3.2. Native tissue recognition
AI는 인체 조직에 대한 수술 중 정보를 제공하는 데에도 사용될 수 있다. 수술 중에는 절제하기 안전한, 조직이 만나는 해부학적 지점인 “surgical plane”을 식별하는 작업이 필수이다. Kumazu 등은 위절제술 비디오를 학습하여 느슨한 결합 조직 섬유로 되어있는 수술 절제면을 자동으로 구분할 수 있는 딥러닝 모델을 개발했다.
중요한 또 다른 관심 분야는 암 재발을 예방하기 위한 수술 중 양성 경계면 최소화에 대한 것이다. Bianchi 등은 로봇 보조 근치전립선절제술(RARP) 중 경계면 양성에 대한 확인을 위해 시행하는 수술 중 냉동 조직 샘플링을 안내하기 위해 수술 전 다중매개변수 자기공명영상(mpMRI)을 사용했다. 증강 현실 3D모델을 만들어서 로봇 콘솔의 화면에 투사시킨 후 암세포가 없는 최적의 위치를 식별할 수 있었다. 이 연구에서 수술 경계면 양성은 기본 접근법과 비교하여 상당히 낮았다.
3.3. Instrument delineation
수술 시야에는 인체 조직과 수술 장비가 같이 존재하는데, 자율 수술에 필요한 AI를 구현하는 데 있어 가장 큰 과제 중 하나가 이를 구별하는 것이다. De Backer 등은 로봇 보조 신장 이식 중 기구를 묘사하기 위한 딥 러닝 네트워크로 구성된 모델을 제시했으며, 이는 97.10%의 Dice 점수를 달성했다.
3.4. Tactile feedback
로봇 보조 수술의 가장 큰 단점 중 하나는 촉각이 없다는 것이다. 이를 해결하기 위해 Doria 등은 해부학적 구조의 촉진에 촉각 피드백을 적용하려고 노력했다. 그들은 처음으로 자궁내 평활근종을 대상으로 강성 모델을 개발했다. 그런 다음 촉각 피드백을 전달하여 뻣뻣한 조직에서 진동을 더 크게 만들었다. 이는 수술 중 발생할 수 있는 과도한 힘으로 인한 조직 파열이나 출혈 같은 부작용의 발생을 예방할 수 있다.
3.5. Stepwise automation
이 과정은 특정 수술 작업을 자동화함으로써 수술 중 작업량을 줄이는 데 중점을 둔다. 그 중 첫 번째는 다빈치 수술 로봇의 자동 카메라 위치 지정을 위한 알고리즘의 개발이다. 수술용 로봇의 봉합 자동화 또한 연구 중이다. 이러한 연구는 앞으로 분명 AI 강화 로봇 수술 분야에서 획기적인 진전임은 분명하다.
3.6. AI and surgical skill assessment
동작, 에너지 및 힘 사용 분석을 통합하는 ML 알고리즘을 사용하면 수술 술기에 대한 정확하며 정량적인 기술 평가를 시행할 수 있다. ML 기반 기술 평가의 핵심 단계는 의사의 손재주를 대표할 수 있는 수술 제스처의 의미 있는 특징을 추출하고 정량화하는 것이다. 이러한 도구는 집도의의 학습 곡선 동안 피드백을 제공하고 주기적인 재평가 및 자격 증명을 보장하는 데 사용될 수 있다.
Ershad 등은 의사의 “동작 스타일”을 분석했다. 이 접근의 이론적 근거는 경험이 많은 의사가 초보 의사에 비해 편안하며 조화로운 방식으로 쉽고 효율적으로 수술을 실행할 수 있다는 데에서 비롯된다. 그들은 로봇수술 경험이 다른 14명의 의사로부터 운동학적 데이터를 얻었으며, 이들은 각각 2가지 작업(링 옮기기 및 봉합)을 3회 수행했다. 이 접근 방식의 이점은 수술 기술 수준을 해석하기 위한 전문 지식이 필요하지 않다는 것이다.
3.7. AI and prediction of postoperative outcomes
Chen 등의 보고에 따르면 이전 치료 결과 예측기로 제안된 D’Amico risk classification에 비해 임상, 병리, 영상 및 게놈 데이터로 훈련된 AI 시스템이 더 우수한 것으로 나타났다. 그러나 환자 관련 요인 외에도 환자의 수술 후 결과에 영향을 미칠 수 있는 의사 관련 요인도 중요하다. Hung 등 은 RARP를 시행한 100명의 환자 그룹에서 요실금 예측을 위한 자동화된 성능 지표 및 DL 모델의 역할을 평가했다. Apical dissection 및 vesicourethral anastomosis 중에 측정된 성능 지표는 이 데이터 세트에서 가장 중요하였고, 이는 이전에 Goldenberg 등이 확인한 바와 같이 초기 요자제를 달성하기 위해서는 수술 기법이 환자 특징보다 더 중요하다는 것을 시사한다.
3.8. AI and surgical guidance
AI 시스템은 증강 현실을 사용하여 수술 중 해부학적 구조에 대한 안내를 함으로써 의사에게 도움을 제공할 수 있다. 수술 부위의 3D 재구성과 같은 증강 현실 영상이 환자 해부학적 구조 위에 정확하게 배치되면 수술 영역에 대한 해석이 향상될 수 있다. 그러나 실제 환경에서의 정확도가 부족하기 때문에 실제 적용은 여전히 실험적이다. 이 방법은 “GPS와 유사한” 수술 내비게이션 전략을 구현할 수 있을 것이다.
4. 미래 전망: 자율 로봇 수술 개발을 위한 AI
AI 시스템과 ML 모델은 인간 감독 하에 다양한 작업을 학습하고 자율적으로 수행할 수 있는 차세대 수술 로봇을 가능하게 하고 있다. 수술 로봇은 큰 성공을 거두었지만 아직 자율시스템이 가야 할 길은 멀다. 아직까지 이러한 시스템이 인체 조직의 복잡성을 분석할 수 없으며 예상치 못한 사건에 대한 처리도 스스로 이루어질 수 없기 때문이다. 그럼에도 자율 로봇 수술의 잠재적인 응용 분야는 제한된 공간에서 정밀한 절개를 요구하는 술기에는 적용이 가능할 것으로 보인다.
인간의 수술 작업을 수행하기 위한 자율 로봇의 최초 사용은 사체를 대상으로 연구되었다. Cadaver 모델은 다양한 조영제 또는 추적자를 사용하여 독성 문제없이 자율 해부를 유도할 수 있어 로봇 훈련에 이상적이다. 실시간 수술에서 이러한 추적자는 장기 및 혈관의 개인차를 식별하여 수술 기술을 맞춤화하는 데 도움이 될 수 있다. 그러나 임상에서 사용하기 전에 자율 로봇 수술을 평가하기 위한 성능 표준이 필요하다. 평가해야 할 가장 중요한 문제는 예상치 못한 사건에 대한 적응, 수술 동작의 정확성 및 반복성이다.
자율 주행 자동차와 마찬가지로 자율로봇수술과 관련하여 윤리, 안전 문제가 발생하고 있다. 우선 수술로봇의 활용은 환자의 동의 없이는 불가능하다. 둘째, 부적절한 정보 저장을 방지하고 환자 안전을 위해서는 로봇이 무엇을 어떻게 학습했는지 평가하는 것이 중요하다. 또한 로봇 시스템은 훈련받지 못한 상황에 대해 어떤 대처를 할지 결정된 것이 없다는 것도 예상치 못한 상황에서 문제가 발생할 가능성이 있다.
5. 결론
로봇 수술은 수술에서 AI의 적용을 위한 좋은 환경이 된다. ML 접근 방식을 사용하면 대량의 데이터를 평가하고 임상적으로 해석할 수 있어 수술 기술 습득, 수술 계획의 효율성 및 수술 후 결과 예측에 관한 중요한 피드백을 제공할 수 있다. 그러나 광범위한 구현을 보장하려면 더 많은 주제에 대한 데이터 수집, 해석 및 검증의 표준화가 필요하다.
자율주행 자동차는 분명 우리의 현실과 가까이 다가오기는 하였으나 아직까지 제한사항이 있는 것도 사실이다. 자율 로봇 수술의 경우도 아직 가야할 길이 멀다. 분명 로봇수술에 AI 구현이 빠르게 확대되고 있으며, 미래에는 더욱 흥미로운 발전이 있을 것으로 기대하지만, 비뇨의학과 영역에서 완전 자율 수술을 실현하기까지는 여전히 많은 장애물이 존재하는 것도 사실이다.